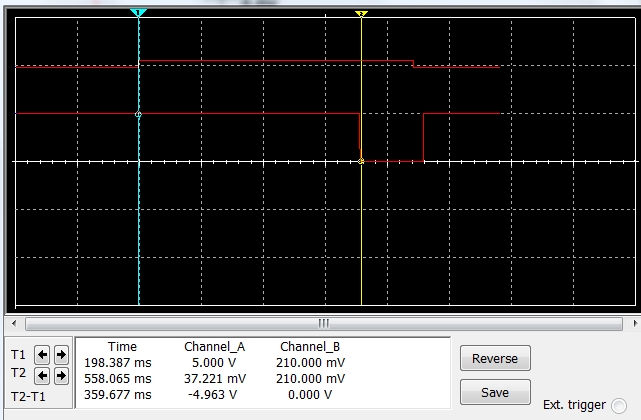
ecco fatta la prima modifica: ho portato il tempo di intervento di comunicazione dell'avvenuto corto al microprocessore da 100uS a 359 mS e il difetto sugli scambi logicamente sparisce basta che la loco non sia proprio lenta lenta lenta, diciamo sotto i 20km/h in scala.
Questo una immagine dello schermo dell'oscilloscopio digitale che mi permette di misurare i tempi in modo molto preciso. Il raising da corto (cancellazione del corto) l'ho mantenuto a circa 20ms che è un tempo di ripristino adeguato. Vorrei far notare che oltretutto stiamo lavorando su tensioni di 200mV che equivalgono a 6A di corto
Questo è quello che vuol dire avere veramente in mano il progetto.

 Ciao,a mio parere è troppo sensibile,forse è sufficiente fare delle prove ed allungare gradualmente
Ciao,a mio parere è troppo sensibile,forse è sufficiente fare delle prove ed allungare gradualmente")